


- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi everyone,
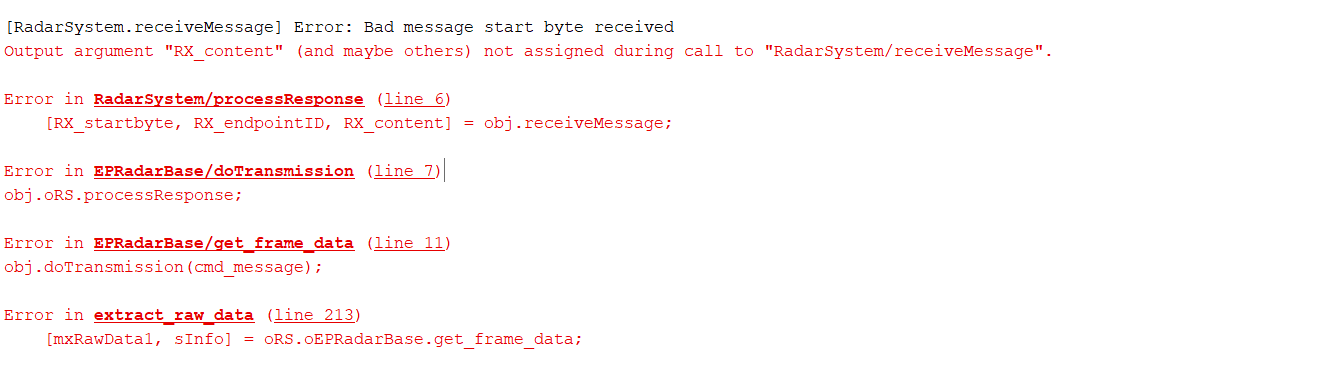
I am working with Position2Go and have a problem transferring real-time raw data to PC when using Matlab. I receive the message about the "Rx_content" error and you can see the error in the image below. I am expecting to receive data with a frame time (in firmware) of 150ms. Is there any solution to this problem?\
Thanks.
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @85258
We've evaluated your support request and been able the reproduce the behavior seen on your side.
The internal USB data transmission is faulty on some machines, leading to a delayed transport and thus to a crash. Using a custom C-based data transport accelerates the transmission and solves this issue.
Please refer to the updated Position2Go ComLib MATLAB Interface package, including the updated ComLib, the C-based data transmission scripts and the updated example file extract_raw_data.m.
Thanks to follow the instructions detailed within the Readme file. Frame time can be minimized to 4ms.
oRS.oEPRadarBase.stop_automatic_frame_trigger;
oRS.oEPRadarBase.num_chirps_per_frame = 1;
oRS.oEPRadarBase.set_automatic_frame_trigger(4000); %(1000000);Best Regards,
Montassar.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @85258 ,
How is the board functioning with the GUI ? Are you able to see the incoming signals?
Best Regards,
Deepa
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @85258 ,
Please try this out and let us know if this works for you. Please go the matlab file with path mentioned below:
Path: "….\IFX_P2G-HW-SW_V1.0.4\Firmware_Software\Communication Library\ComLib_Matlab_Interface\RadarSystemImplementation\@RadarSystem\sendMessage.m
Comment out the selected part of the code as shown below :

{kind=link}
{kind=link}
{kind=link}
Best Regards,
Deepa
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Deepa_V,
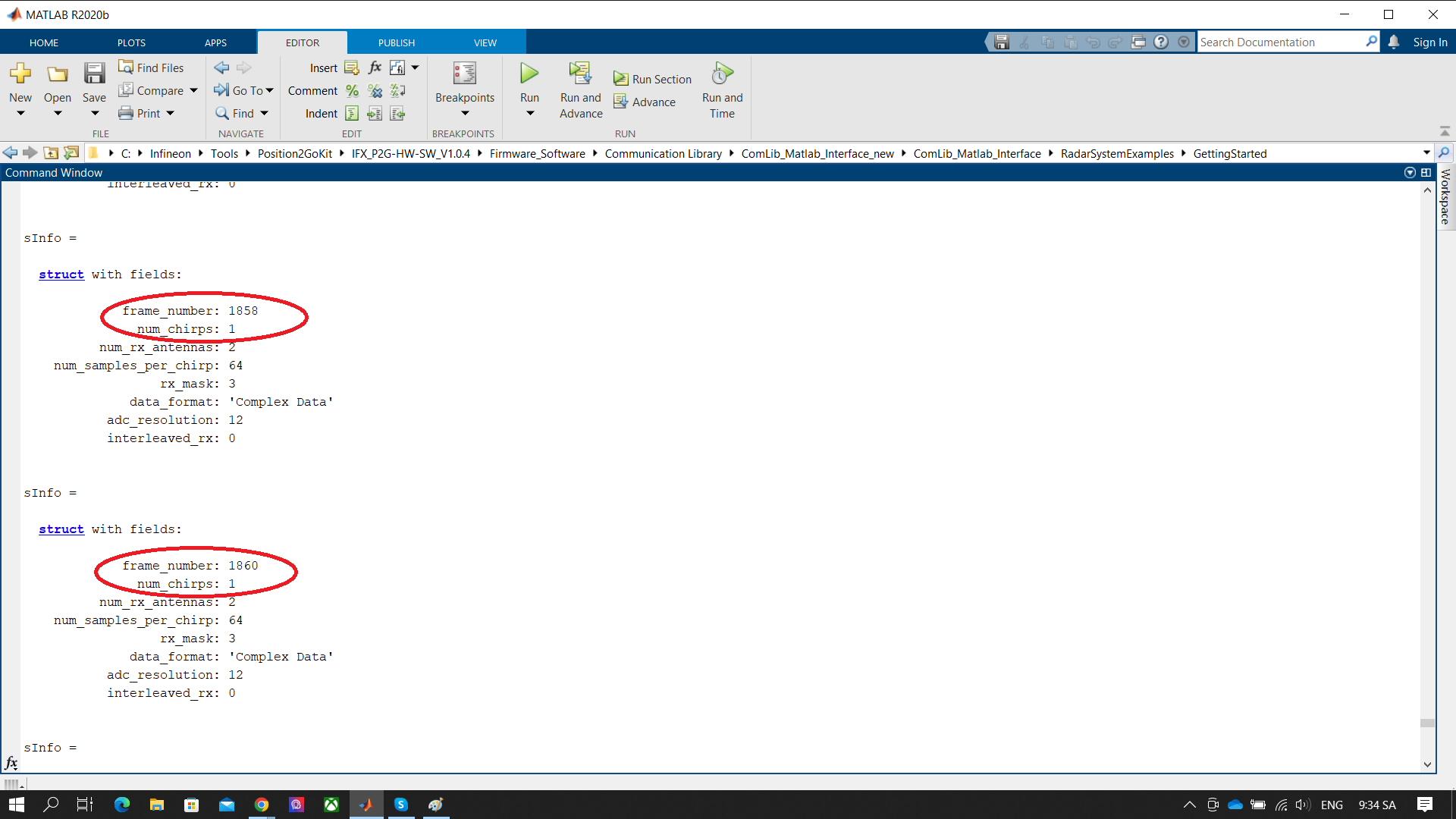
I try editing according to your instructions. However, it doesn't seem to work well. I received empty packages mixed with data packages (you can see all of them in the log file). The PRT estimate for each loop is the same but "frame_number" increases correctly(!?). Additionally, I get the error message "[RadarSystem.sendMessage] Error: Unable to write to USB!" and wrong PRT estimated along with this.
If you need any information to figure out the problem let me know!
Best Regards,
Minh
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @Deepa_V,
I don't clearly figure out your question.
I haven't implemented my code yet. I'm just testing the "extract_raw_data.m" file you provided and it's crashed when collecting data.
I understand that I can collect raw data by using Radar GUI and it works well. However, I want to real-time test my code in Matlab and create my GUI that's why I need your help to solve the crashing problem.
The raw data that I want to collect is the same with Radar GUI default config and the frame time is 150ms. The application is the presence detect.
Another special thing, if you can transfer data at a faster rate, Can I get data: 1chirp/frame & frame time is 2ms or 5ms or at least 10ms? the application is a vital-sign measurement.
Best Regards,
H.Minh
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @85258 ,
P2Go will not work for your stated application. We suggest you use either Sense2GoL pulse for presence detection or BGT60TR13C.
Best Regards,
Deepa
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @Deepa_V,
It's just a name. The problem is collecting data. Can you fix the collecting file? I want to use it instead of Radar GUI.
Best Regards,
H.Minh
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @85258 ,
Did you try to run the extract_raw_data.m MATLAB Script ?
If not, please follow the steps below and let us know about your findings.
- Go to: Firmware_Software → Communication Library → ComLib_Matlab_Interface → Examples → GettingStarted. Copy the path.
- Open MATLAB. Paste the path in the top tab. “extract_raw_data.m” file will show up on the left tab
- Connect the P2G board
- Click on “Run” to see raw data
Hope that helps !
Cheers,
Montassar.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @Montassar-BR,
That's exactly the file I'm running. I am testing the file provided by Infineon. However, it runs unstable and failed (default frame time = 1s). The instability occurs more when reducing the frame time to 150ms (equal to the frame time used in radar GUI or firmware). The error log has been uploaded in the above conversations. Please help me solve this!
Thanks,
Minh.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @85258
We've evaluated your support request and been able the reproduce the behavior seen on your side.
The internal USB data transmission is faulty on some machines, leading to a delayed transport and thus to a crash. Using a custom C-based data transport accelerates the transmission and solves this issue.
Please refer to the updated Position2Go ComLib MATLAB Interface package, including the updated ComLib, the C-based data transmission scripts and the updated example file extract_raw_data.m.
Thanks to follow the instructions detailed within the Readme file. Frame time can be minimized to 4ms.
oRS.oEPRadarBase.stop_automatic_frame_trigger;
oRS.oEPRadarBase.num_chirps_per_frame = 1;
oRS.oEPRadarBase.set_automatic_frame_trigger(4000); %(1000000);Best Regards,
Montassar.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I have read your announcement. Is Infineon only discontinued supporting the P2G Demo Kits, right? Does Infineon stop producing BGT24MTr12 MMIC?
About my problem,
Thanks for your support! I will test and notify you.
Best Regards,
Minh.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Minh,
Only DEMO board is discontinued.
Can you please share your findings so that we close the thread ?
Cheers,
Montassar.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi @Montassar-BR,
First of all, thank you for providing the solution. I tested with your improved file:
- The system works perfectly with a 150ms frame with my presence detection system.
- For requirement 1chirp/frame and the frame time is reduced to the minimum, the system works fine from 6ms or more. However, the system skips 1-2 frames of data with a 4 or 5ms frame time setting(frequent). For me, I am comfortable with 6ms to test vital-sign measurements.
Best Regards,
Minh.
{kind=link}
{kind=link}