

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
- Labels:
-
PSoC 5LP
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Welcome in the forum!
Please do not try to post code-snippets but attach a completre project archive, so we all can have a look at all of your settings. To do so, use
Creator->File->Create Workspace Bundle (minimal)
and attach the resulting file. A link to the datasheet of the compass would be helpful, so we must not search for it.
Bob

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
You did not enable global interrupts which is requred for the I2C-component to function properly..
uint8 send_data[] = {X_MSB_Reg};
uint8 *setup = send_data;
I2C_Compass_MasterWriteBuf(SLAVE_ADD, setup, 1u,I2C_Compass_MODE_COMPLETE_XFER);
This sequence can be done easier, since in C-language an array is a pointer to its data. So you might write
uint8 send_data[] = {X_MSB_Reg};
I2C_Compass_MasterWriteBuf(SLAVE_ADD, send_data, 1u,I2C_Compass_MODE_COMPLETE_XFER);
thus saving an additional variable and its initialization.
Sometimes it is requred to address an I2C-slave with a sequence of
MasterSendStart(); //Initializing a read register sequence
MasterWriteByte(); // Register to read
MasterSendRestart(); // Switch to reading now
MasterReadByte(); // Get register value, could be repeated, some devices allow for that
MasterSendStop(); // End the transmission
Happy coding
Bob
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
There is a fairly good ap note here and some examples.
www.dropbox.com/s/1s8u0uurlhw0nbs/I2C%20Ap%20Notes.zip
Regrds, Dana.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I have been working with the PSOC for some time. I really like them and find the very useful. The issue I have them is I have always had problems with the I2C. I am trying to use the this same sensor. I have the interrupts enable. I have connected it to a logic analyzer and I can see that when I make the function call MasterSendStart(); It is sending out the data that I would expect. I am even seeing the Ack. The problem that I am having is with the next line which is I2C_MasterWriteByte(byte); it just hangs up in here and never continues. Any hints?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Welcome in the forum!
Can you post your complete project, so that we all can have a look at all of your settings? To do so, use
Creator->File->Create Workspace Bundle (minimal)
and attach the resulting file.
MasterSendStart() returned a value, was it != zero? Same for MasterSendByte(), what was returned.
What is your environment? Cypress Kit?? Self-made pcb???
I2C terminated correctly? Connections checked twice?
Bob
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
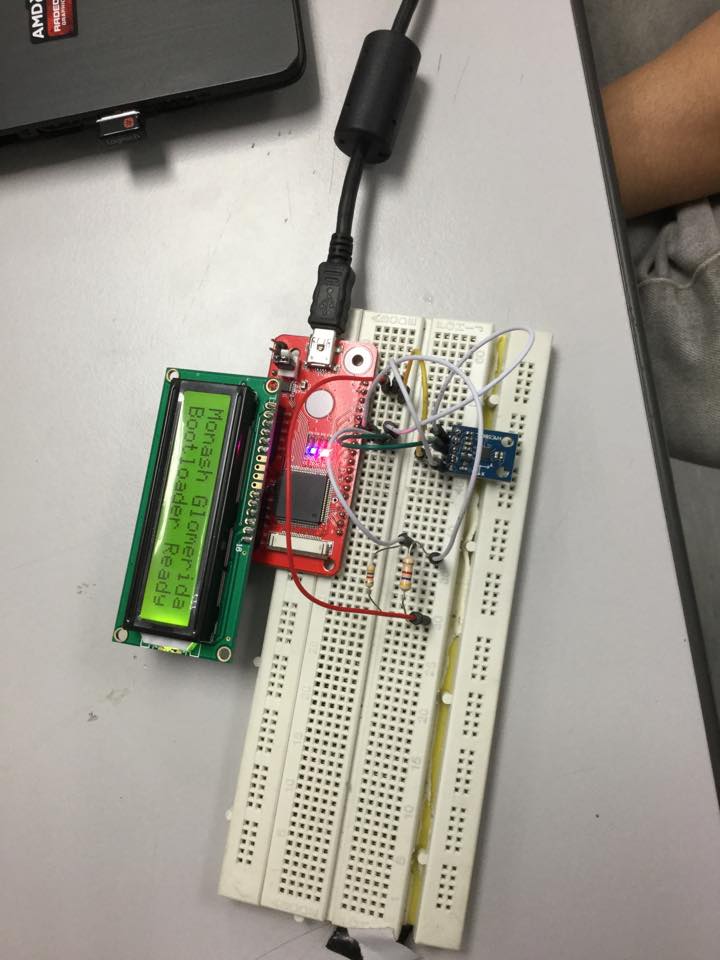
I am using the FreeSoC2 Development Board - PSoC5LP https://www.sparkfun.com/products/13229. I can't see what is being returned in the status it doesn't come up in the locals when I am am running it in the debugger. I have checked the connections many of time. It works with an Arduino I set up just to test the sensor. I can also see the data that I expect on a logic analyzer when this line of code is executed: I2C_MasterSendStart(HMC5883L_ADDRESS, I2C_WRITE_XFER_MODE). I have uploaded the file. The main function I have been debugging is HMC5883L_Config(). I do have uart that I was using for debuging.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Here is a PSOC 4 solution you could possibly adapt -
https://github.com/EmbeddedSam/PSoC-4-Compass-Sensor
Regards, Dana.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
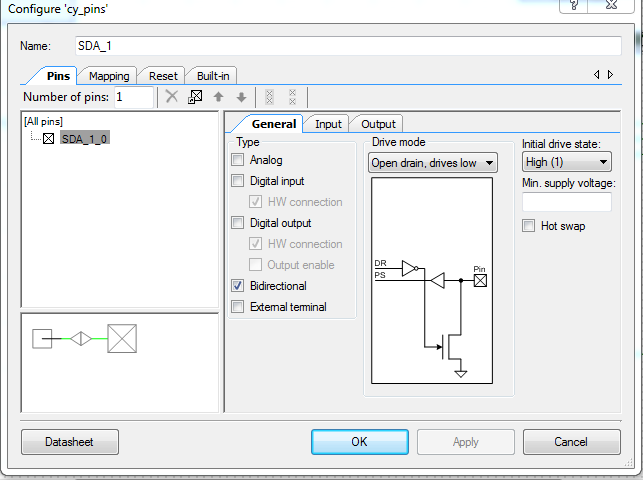
First I see that the pin connected to sda is not configured correctly. Datasheet states:
sda – In/Out
Serial data (SDA) is the I2C data signal. It is a bidirectional data signal used to transmit or receive all bus data. The pin connected to sda should be configured as Open-Drain-Drives-Low.
Usually reading from an I2C-device is done in one transaction, in your case like
I2C_MasterSendStart(HMC5883L_ADDRESS, I2C_WRITE_XFER_MODE);
I2C_MasterWriteByte(array[0]);
I2C_MasterWriteByte(array[1]);
I2C_MasterSendRestart(HMC5883L_ADDRESS, I2C_READ_XFER_MODE);
array[0] = I2C_MasterReadByte(I2C_ACK_DATA);
array[1] = I2C_MasterReadByte(I2C_ACK_DATA);
array[2] = I2C_MasterReadByte(I2C_ACK_DATA);
array[3] = I2C_MasterReadByte(I2C_ACK_DATA);
array[4] = I2C_MasterReadByte(I2C_ACK_DATA);
array[5] = I2C_MasterReadByte(I2C_NAK_DATA); // Signal LAST BYTE to read
I2C_MasterSendStop();
Additionally I would suggest to check the returned values of SendStart() etc which are ment to indicate any errors occured.
Bob
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Bob,
I don't know where you saw that configuration but as I am looking at mine it is configured like you said. No I didn't change it. See the screen shot that I have attached

Other than checking that what you said I feel I have all ready been work with. In the config function I guess I don't need to stop it and start it again to set up the next set or regs.
Thanks,
Jorden Luke

{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I have found out that after I do my status = I2C_MasterSendStart(HMC5883L_ADDRESS, I2C_WRITE_XFER_MODE); I get 3 returned. Which I understand to be a the last bite got Nacked. Which means to say that the address got Naked because that is the only thing i sent right?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Ok I looked into the spark fun board was not giving enough output on 3.3v line to make it the sensor work. I had to make some modifications to the board as prescribe on their website and now it isn't nacking. It still doesn't work fully but I think that is to pour choice with pointers I will continue to fix it on my own. Thanks for you help.
Jorden Luke
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
So has anyone solved the problem for the magnetometer. I cannot solve it. Infact I dont Know how to start. Any help would be greatly appreciated. Thanks
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
So has anyone been able to solve the problem for the compass and I2C. I am currently working on it and i dont know where to start. I read the datasheet but I m still confused. Any help would be greatly appreciated. Thanks
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
What is the state of your project? Pleasee upload a workspace and tell us what works and what does not work.
Bob
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Also when we connect do we need to use any external resistors.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
If you look at the Honeywell datasheet the module does not have the
I2C pins pulled up internally, so unless the board you are using to drive
the Honeywell part has them you need to add the pullups externally.
Regards, Dana.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Bob
I still can't figure out how to work with the compass
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Regard Dana's advice concerning the pull-ups!
The datasheet for your device is not quite clear and leads to mis-interpretations (which you did follow)
Datasheet tells to send 0x3c or 0x3d. This is not what you should do. 0x3c is the device address 0x1E shifted 1 bit left and padded with the write bit, 0x3D the same, but padded with the read bit. So this is ment to be replaced by
I2C_MasterSendStart(HMC5883L_ADDRESS,I2C_WRITE_XFER_MODE); // 0x3c
or
I2C_MasterSendStart(HMC5883L_ADDRESS,I2C_READ_XFER_MODE); // ßx3d
Reading: do not send the 0x06, they really mean: "read six bytes"
Instead set the internal data-pointer to 0x03
I2C_MasterSendStart(HMC5883L_ADDRESS,I2C_WRITE_XFER_MODE);
I2C_MasterWriteByte(0x03);
I2C_MasterSendStop();
CyDelay(67);
Then with a new transaction read the X,Z and Y values
I2C_MasterSendStart(HMC5883L_ADDRESS, I2C_READ_XFER_MODE);
array[0] = I2C_MasterReadByte(I2C_ACK_DATA);
array[1] = I2C_MasterReadByte(I2C_ACK_DATA);
array[2] = I2C_MasterReadByte(I2C_ACK_DATA);
array[3] = I2C_MasterReadByte(I2C_ACK_DATA);
array[4] = I2C_MasterReadByte(I2C_ACK_DATA);
array[5] = I2C_MasterReadByte(I2C_NAK_DATA); //*** Mind the NAK !!!
I2C_MasterSendStop();
To get the desired values you will have to combine two of the array[] values to form a 16-bit number.
Happy coding
Bob
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Not sure what goes wrong, any symptoms? What I can see is your conversion going wrong:
x_com = (array[0] << 😎 | array[1];
Since array are uint8 the term array[0] << 8 will result in zero. better use
(int16)array[0] << 8
your expected result is type int, so you have to cast the expression accordingly
x_com = ((int16)array[0] << 😎 | (uint16)array[1];
Bob