


- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi,
I am trying to get my CY8CKit-044 to talk over CAN. To do this I connected CAN-Tx and CAN-Rx together to a pull up resistor (with the CAN-Tx pin being set to open drain). This was then connected to my Saleae Logic Pro 8.
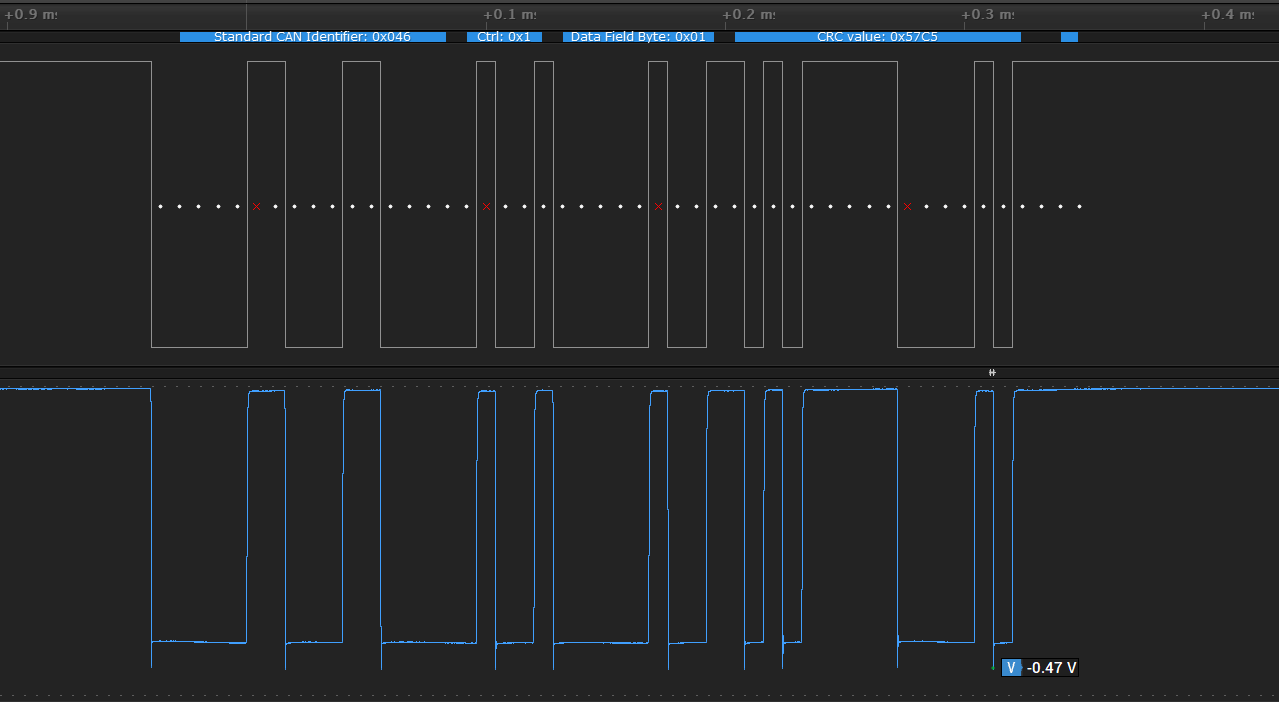
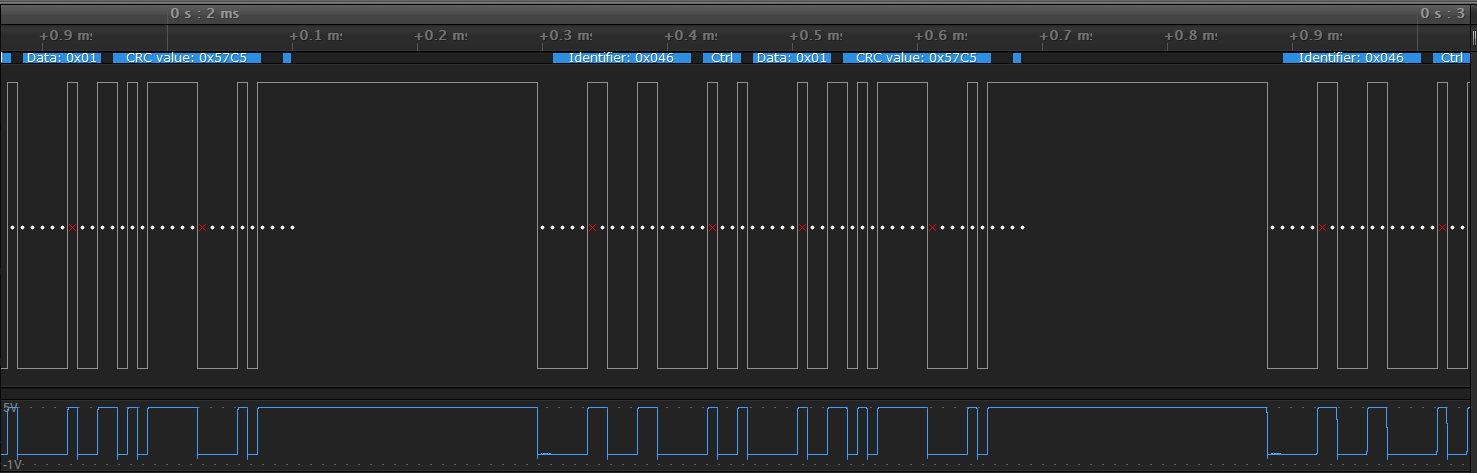
Using the code below, the output seems to be fine (message intact and a NAK at end) but the controller keeps on transmitting the frame with CAN_1_Data = 1 and no delay (Capture #2). If I turn single shot on, the message is only transmitted once and then a second later another frame is sent with the data byte being 255 (what I want (capture#1)). Am I not doing something in the code to properly set up the controller/frame?
Thanks,
Luke
uint8 CAN_1_Data = 1;
int main(void) {
CyGlobalIntEnable;
CAN_1_Start();
UART_Start();
for( ;; ) {
CAN_1_TX_DATA_BYTE1(CAN_1_TX_MAILBOX_0, CAN_1_Data);
CAN_1_SendMsg0();
CyDelay(1000);
if(CAN_1_Data == 1) {
CAN_1_Data = 255;
}
else{
CAN_1_Data = 1;
}
}
}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Luke,
Can you monitor if CAN_1_SendMsg0 returns success and only then go ahead for next update?
For eg. refer below:
while(CYRET_SUCCESS != CAN_1_SendMsg0() );
Regards
Harshada